
Xaver Schmidt (*)
O mercado de robôs está crescendo rapidamente. No entanto, integrá-los ao mundo da automação pode ser muito trabalhoso e lento, mas, um novo perfil de robô agora fornece um remédio.
Novo grupo de trabalho de sistemas robôs
 Muitas empresas de médio porte, seja na indústria alimentícia, na indústria de embalagens ou fornecedores de eletrônicos, estão cada vez mais se voltando para aplicações assistidas por robôs (pick & place). No entanto, se você olhar para a implementação prática, há alguns desafios a serem superados. Isso porque cada fabricante de robôs hoje traz consigo seu próprio mundo de automação, incluindo hardware e software, know-how de programação específica, interfaces, controladores, dispositivos operacionais, sistemas de engenharia, etc.
Muitas empresas de médio porte, seja na indústria alimentícia, na indústria de embalagens ou fornecedores de eletrônicos, estão cada vez mais se voltando para aplicações assistidas por robôs (pick & place). No entanto, se você olhar para a implementação prática, há alguns desafios a serem superados. Isso porque cada fabricante de robôs hoje traz consigo seu próprio mundo de automação, incluindo hardware e software, know-how de programação específica, interfaces, controladores, dispositivos operacionais, sistemas de engenharia, etc.
A linha de produção é normalmente controlada por um PLC, e o usuário programa a aplicação da linha de produção por meio do sistema de programação do PLC. Se uma empresa quer integrar um robô em um processo de nível mais alto, principalmente controlado por PLC, isso é, muitas vezes, muito tedioso. A engenharia e o comissionamento, em particular, estão associados a um alto nível de complexidade e muito esforço. Primeiro, a interface em si deve ser definida, seguida pelo programa PLC, e então o programa deve ser integrado no controlador robô. A definição das interfaces não é padronizada e, portanto, deve ser criada repetidamente. Esse trabalho é demorado e não é o foco de um usuário.
A inovação não deve desacelerar
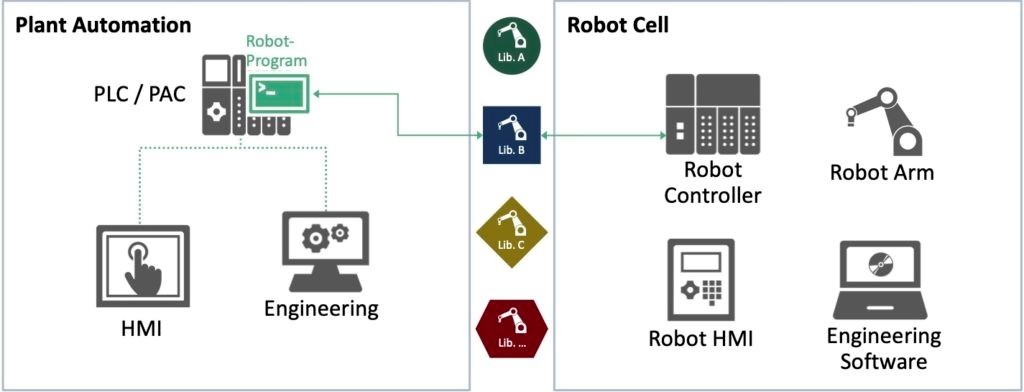
Problema: Diferentes bibliotecas para robôs de diferentes fabricantes tornam a integração extremamente demorada
Mesmo em operação posterior, a carga de trabalho permanece alta: cada manutenção do sistema, cada atualização, a integração de um tipo diferente de robô ou mesmo um novo fabricante implica uma abundância de trabalho. Para piorar, os especialistas em robôs são poucos e distantes. Portanto, esse trabalho geralmente é terceirizado para integradores de sistemas, o que, por sua vez, significa esforço e despesa. Como resultado, os usuários de robôs industriais geralmente têm que decidir cedo em qual tipo de robô e fabricante eles querem investir esforço. Soluções inovadoras são, portanto, usadas com menos frequência.
Interface uniforme para robôs
Por essa razão, há muito tempo há um desejo de que os usuários possam controlar uniformemente e programar os sistemas robôs completos de diferentes fabricantes integrados em uma linha de produção por meio do sistema de programação PLC.
Os principais fabricantes de robôs – ABB, Comau, Epson, Fanuc, Jaka, Kawasaki, Kuka, Nachi, Panasonic, Stäubli, TM Robot, Yamaha, Yaskawa – uniram forças, por iniciativa da Siemens, para desenvolver uma solução. Isso significava que cerca de 70% dos fabricantes de robôs do mundo estavam a bordo. Foram dois anos para encontrar e desenvolver o conceito, que era tudo menos trivial. Afinal, a engenharia e os sistemas de tempo de execução nos respectivos robôs foram lançados no mercado décadas atrás, em alguns casos, e foram continuamente desenvolvidos ao longo desses anos. Para dar apenas um exemplo: os mesmos movimentos estão atualmente representados de forma bem diferente na engenharia.
O trabalho conjunto valeu a pena! Agora, uma interface de dados uniforme entre o PLC e os controladores robôs foi definida para tornar a programação de robôs uniforme – e, portanto, mais eficiente – para programadores de PLC e fornecedores de PLC. Por meio dessa interface de dados, os programas de robôs podem ser escritos completamente no PLC, chamando as funções do robô e relatando as informações necessárias do estado robô de volta ao PLC. O desenvolvimento, elaboração e manutenção da nova interface de dados foram colocados nas mãos da PI. Para o desenvolvimento desse perfil de robô, a PI criou um novo grupo de trabalho, “Robot Systems”, e lançou a “Interface padrão de comando robô”.
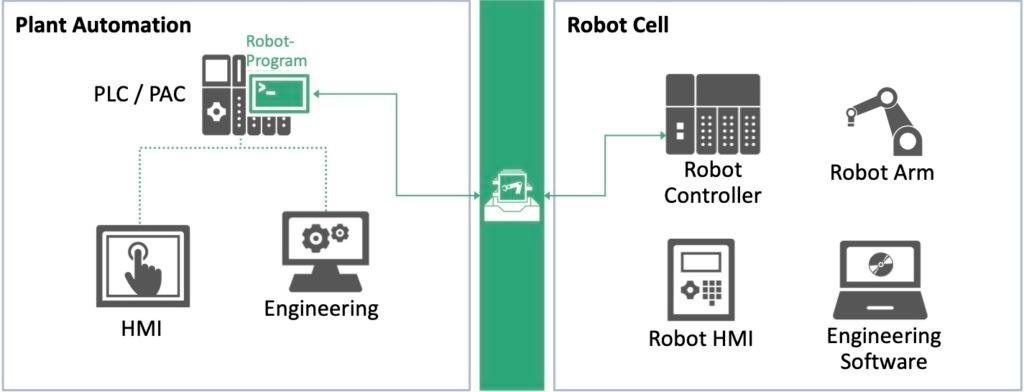
Solução: Uma única biblioteca independente do fabricante significa programar o robô diretamente no PLC
Essa interface de dados será mapeada pela primeira vez para a PROFINET, uma vez que provou-se em muitas aplicações ao longo de muitos anos, tanto por parte dos fabricantes de robôs quanto por parte dos fabricantes de PLC.
Do lado do robô, os comandos são convertidos no ambiente/linguagem de programação local por meio da interface uniforme (interpretados). No lado do PLC, também podem ser criados modelos ou comandos de nível superior que combinam várias ações na interface de dados.
Uma biblioteca de robôs única

Como em outras tecnologias, haverá diferentes níveis ou classes na interface do robô. Primeiro, haverá um conjunto definido de funções, que são necessárias para todos e para funções simples. Funções de nível mais alto podem então ser adicionadas como uma opção. O foco ainda está no manuseio de funções, por exemplo, aplicativos pick & place. Funções como modo de corrida, ensino de pontos de caminhos, criação e validação de um perfil de movimento e dados de configuração em mudança são fornecidas para esse fim. No futuro, porém, planeja-se integrar outras aplicações, como as de robôs de soldagem, também.
Agora, o fabricante de PLC só precisa de uma única biblioteca de robôs que contenha os blocos de função para programar robôs de diferentes fabricantes. O fabricante do robô também só precisa implementar um único intérprete para o controle do robô. A programação é feita inteiramente pelos especialistas em automação de PLC.
Usuários e fabricantes estão convencidos de que isso reduzirá significativamente a complexidade do serviço e manutenção em aplicativos baseados em robôs.
 (*) Xaver Schmidt
(*) Xaver Schmidt
Grupo de Trabalho líder PI “Indústria 4.0”